Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPAQualitätsprognose geometrischer Merkmale durch virtuellen Zusammenbau mit realen Messdaten (GeoFit)
Ausgangssituation
Optische 3D-Messverfahren wie die Streifenprojektion erlauben zunehmend dichte Messpunktewolken von Bauteilen mit hoher Genauigkeit zu erfassen. Das Paradigma spärlicher Messpunktewolken aus der Zeit überwiegend taktiler Messungen wird zunehmend aufgelöst. Taktile Messungen erforderten lange Messzeiten, da Messpunkte einzeln oder im Scanmodus entlang einer Scanningbahn angetastet werden mussten.
Geometrische Abweichungen von Bauteilen sind besonders im Zusammenbau mehrerer Bauteile von großer Relevanz. Die Abweichungen akkumulieren sich zu großen Beträgen, die dazu führen können, dass die Funktion des Zusammenbaus nicht oder nur eingeschränkt erfüllt wird. Methoden zur sogenannten Bezugsbildung erlauben, die Messdaten mehrerer Bauteile zueinander zu referenzieren, um geometrische Eigenschaften des Zusammenbaus zu ermitteln.
Das Defizit bestehender Ansätze besteht darin, dass hierbei keine Formabweichungen der Bauteile berücksichtigt werden. Formabweichungen umfassen Welligkeit und Rauheit, die lokal variieren. Moderne 3D-Messverfahren erlauben nun jedoch, diese Informationen zu ermitteln. Somit besteht die Möglichkeit, diese zusätzlichen Informationen zu nutzen, um die Genauigkeit von Aussagen über den Zusammenbau zu verbessern.
Ziele des Projekts
Für die Bezugsbildung unter Berücksichtigung lokaler Formabweichungen, die mittels dichter, genauer Messdaten repräsentiert werden, soll ein geeignetes Verfahren entwickelt werden. Im Kontext des Projekts wird das Verfahren als "virtueller Zusammenbau" bezeichnet. Hierzu müssen zunächst die Einflussgrößen des korrespondierenden, physikalischen Fügeprozesses systematisiert und berücksichtigt werden. Bestehende Ansätze im Stand der Technik zeigen auf, dass Messunsicherheiten durch Anwendung dieser Ansätze relativ stark zunehmen, da Wiederholbarkeit und Reproduzierbarkeit relativ gering sind, verglichen mit konventionellen Registrierungsverfahren wie dem "Best Fit", der Einpassung nach der Methode der kleinsten Fehlerquadrate. Durch eine systematische Vorgehensweise soll ein robuster Algorithmus identifiziert werden, der Lösungen für gängige Montageprobleme bietet.
Projektergebnisse
GeoFit-Software
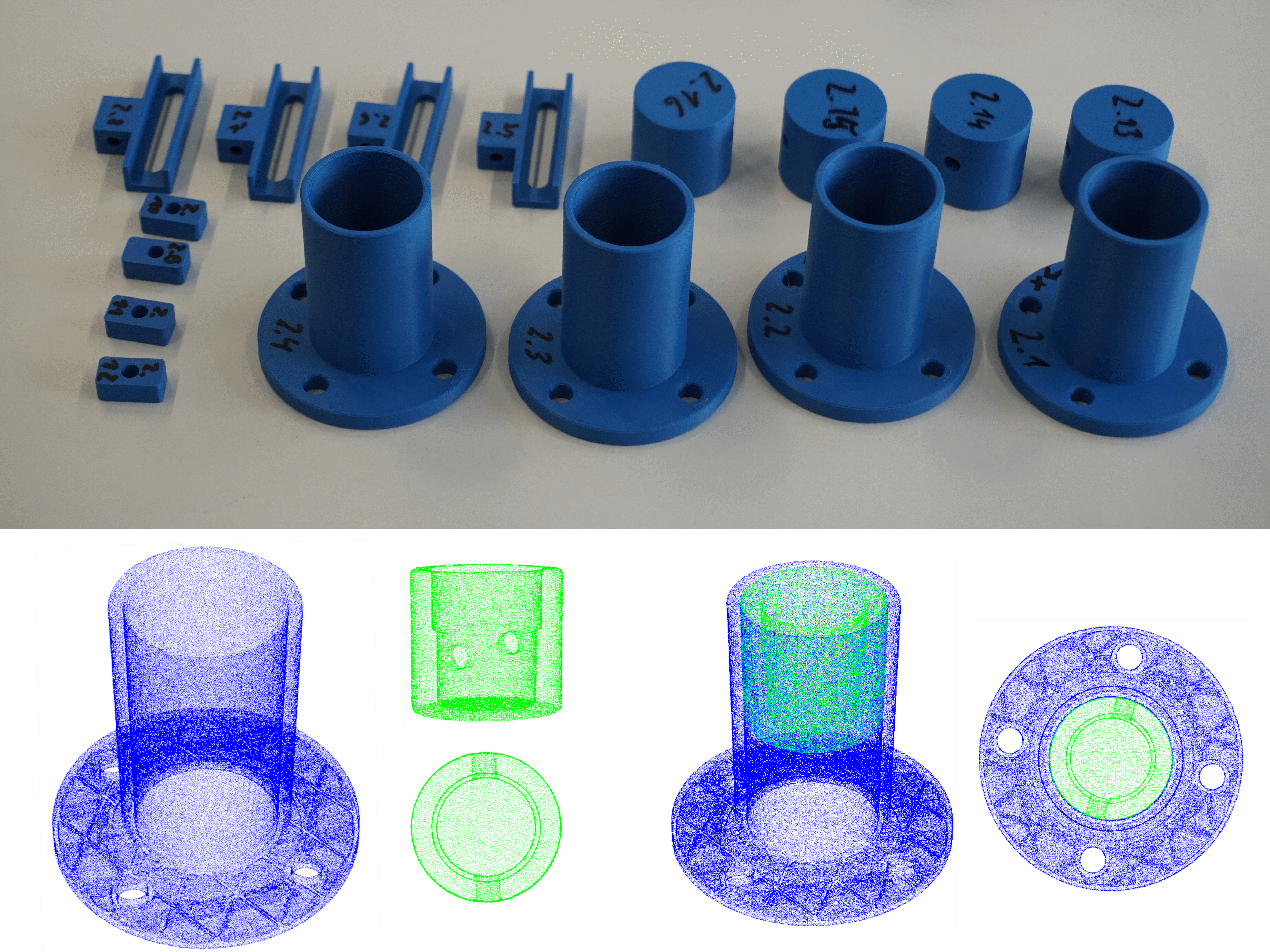
Die im Projekt entwickelte GeoFitSoftware ermöglicht den "virtuellen Zusammenbau" vermessener Bauteile. Bei Vorhandensein mehrerer Bauteile wird die die Kombination hinsichtlich einer Abstandsminimierung der Bauteile optimiert. In Zusammenarbeit mit der TU Chemnitz wurde als Beispiel der "virtuelle Zusammenbau" und das anschließende Finden einer optimalen Bauteilpaarung von mit einem CT vermessenen Bauteilen eines Stirling-Motors erarbeitet. Die 3D-Punktwolken des inneren Zylinders werden virtuell in den äußeren Zylinder einpasst. Die optimale Paarung von je vier inneren und äußeren Zylindern ist in Abbildung unten dargestellt. Solange die jeweiligen Oberflächen adäquat aufgenommen wurden, spielt es keine Rolle, mit welcher Technologie (Streifenprojektion, Lasertriangulation, Computer Tomografie) die 3D-Daten erhoben wurden. Auch ist mit der GeoFit-Software das Fügen aller 3D-Fügegeometrien möglich. Für jede neue zu fügende Baugruppe müssen lediglich die Kontaktflächen der Bauteile definiert werden.